Last updated on 11th Jun 2020| 5702
What are Drones?
An unmanned aerial vehicle (UAV) (or uncrewed aerial vehicle, commonly known as a drone) is an aircraft without a human pilot on board and a type of unmanned vehicle. UAVs are a component of an unmanned aircraft system (UAS); which include a UAV, a ground-based controller, and a system of communications between the two. The flight of UAVs may operate with various degrees of autonomy: either under remote control by a human operator or autonomously by onboard computers.Compared to crewed aircraft, UAVs were originally used for missions too “dull, dirty or dangerous” for humans. While they originated mostly in military applications, their use is rapidly expanding to commercial, scientific, recreational, agricultural, and other applications, such as policing and surveillance, product deliveries, aerial photography, infrastructure inspections, smuggling,and drone racing. Civilian UAVs now vastly outnumber military UAVs, with estimates of over a million sold by 2015.

Terminology:
- The term drone, more widely used by the public, was coined in reference to the early remotely-flown target aircraft used for practice firing of a battleship’s guns, and the term was first used with the 1920s Fairey Queen and 1930’s de Havilland Queen Bee target aircraft. These two were followed in service by the similarly-named Airspeed Queen Wasp and Miles Queen Martinet, before ultimate replacement by the GAF Jindivik.The term unmanned aircraft system (UAS) was adopted by the United States Department of Defense (DoD) and the United States Federal Aviation Administration in 2005 according to their Unmanned Aircraft System Roadmap 2005–2030. The International Civil Aviation Organization (ICAO) and the British Civil Aviation Authority adopted this term, also used in the European Union’s Single-European-Sky (SES) Air-Traffic-Management (ATM) Research (SESAR Joint Undertaking) roadmap for 2020. This term emphasizes the importance of elements other than the aircraft. It includes elements such as ground control stations, data links and other support equipment. A similar term is an unmanned-aircraft vehicle system (UAVS), remotely piloted aerial vehicle (RPAV), remotely piloted aircraft system (RPAS). Many similar terms are in use.A UAV is defined as a “powered, aerial vehicle that does not carry a human operator, uses aerodynamic forces to provide vehicle lift, can fly autonomously or be piloted remotely, can be expendable or recoverable, and can carry a lethal or nonlethal payload”. Therefore, missiles are not considered UAVs because the vehicle itself is a weapon that is not reused, though it is also uncrewed and in some cases remotely guided. That being said, UAV is a term that is commonly applied to military use cases.
- The terms autonomous drone and UAV are often wrongfully used interchangeably. This could stem from the fact that many UAVs are automated, i.e. they carry out automated missions but still rely on human operators. However, an autonomous drone is a “UAV that can operate without any human intervention”. In other words, autonomous drones take off, carry out missions, and land completely autonomously. Thus, an autonomous drone is a type of UAV but a UAV is not necessarily an autonomous drone.
Fully autonomous Percepto drone landing in strong winds without any human intervention.As autonomous drones are not piloted by humans, a ground control system, or communications management software, plays a major role in their operations, and thus they are also considered part of a UAS. In addition to the software, autonomous drones also employ a host of advanced technologies that allow them to carry out their missions without human intervention, such as cloud computing, computer vision, artificial intelligence, machine learning, deep learning, and thermal sensors.In recent years, autonomous drones have begun to transform various commercial industries as they can fly beyond visual line of sight (BVLOS) while maximizing production, reducing costs and risks, ensuring site safety, security and regulatory compliance, and protecting the human workforce in times of a pandemic. They can also be used for consumer-related missions like package delivery, as demonstrated by Amazon Prime Air, and critical deliveries of health supplies.
A Drone-in-a-Box (DIB) is an autonomous drone that deploys to carry out a pre-programmed list of missions from and returns to a self-contained landing box, which also functions as the drone’s charging base.Under new regulations which came into effect June 1, 2019, the term RPAS (Remotely Piloted Aircraft System) has been adopted by the Canadian Government to mean “a set of configurable elements consisting of a remotely piloted aircraft, its control station, the command and control links and any other system elements required during flight operation”.The relation of UAVs to remote controlled model aircraft is unclear. UAVs may or may not include model aircraft. Some jurisdictions base their definition on size or weight; however, the US Federal Aviation Administration defines any uncrewed flying craft as a UAV regardless of size. For recreational uses, a drone (as opposed to a UAV) is a model aircraft that has first-person video, autonomous capabilities, or both
History:
The earliest recorded use of an unmanned aerial vehicle for warfighting occurred in July 1849, serving as a balloon carrier (the precursor to the aircraft carrier) in the first offensive use of air power in naval aviation. Austrian forces besieging Venice attempted to launch some 200 incendiary balloons at the besieged city. The balloons were launched mainly from land; however, some were also launched from the Austrian ship SMS Vulcano. At least one bomb fell in the city; however, due to the wind changing after launch, most of the balloons missed their target, and some drifted back over Austrian lines and the launching ship Vulcano.
UAV innovations started in the early 1900s and originally focused on providing practice targets for training military personnel. UAV development continued during World War I, when the Dayton-Wright Airplane Company invented a pilotless aerial torpedo that would explode at a preset time.The earliest attempt at a powered UAV was A. M. Low’s “Aerial Target” in 1916. Nikola Tesla described a fleet of uncrewed aerial combat vehicles in 1915. Advances followed during and after World War I, including the Hewitt-Sperry Automatic Airplane. This development also inspired the development of the Kettering Bug by Charles Kettering from Dayton, Ohio. This was initially meant as an uncrewed plane that would carry an explosive payload to a predetermined target. The first scaled remote piloted vehicle was developed by film star and model-airplane enthusiast Reginald Denny in 1935, More emerged during World War II – used both to train anti aircraft gunners and to fly attack missions. Nazi Germany produced and used various UAV aircraft during the war. Jet engines entered service after World War II in vehicles such as the Australian GAF Jindivik, and Teledyne Ryan Firebee I of 1951, while companies like Beechcraft offered their Model 1001 for the U.S. Navy in 1955.Nevertheless, they were little more than remote-controlled airplanes until the Vietnam War.
GA Jindivik:
The GAF Jindivik is a radio-controlled target drone produced by the Australian Government Aircraft Factories (GAF). The name is from an Aboriginal Australian word meaning “the hunted one”.Two manually-controlled prototypes, were built as the GAF Pika (Project C) as a proof of concept to test the aerodynamics, engine and radio control systems, serialled A92-1/2, ‘B-1/2’. The radio-controlled Jindivik was initially designated the Project B and received serials in the A93 series. Pika is an Aboriginal Australian word meaning flier.

Classification:
UAVs typically fall into one of six functional categories (although multi-role airframe platforms are becoming more prevalent):
- Target and decoy – providing ground and aerial gunnery a target that simulates an enemy aircraft or missile
- Reconnaissance – providing battlefield intelligence
- Combat – providing attack capability for high-risk missions (see: Unmanned combat aerial vehicle (UCAV))
- Logistics – delivering cargo
- Research and development – improve UAV technologies
- Civil and commercial UAVs – agriculture, aerial photography, data collection

Learn Practical Oriented Drones Training Course from Real Time Experts
Weekday / Weekend BatchesSee Batch DetailsThe U.S. Military UAV tier system is used by military planners to designate the various individual aircraft elements in an overall usage plan.

Schiebel S-100 fitted with a Lightweight Multirole Missile

Northrop Grumman Bat carrying EO/IR and SAR sensors, laser range finders, laser designators, Infra-Red cameras
Vehicles can be categorized in terms of range/altitude. The following has been advanced as relevant at industry events such as ParcAberporth Unmanned Systems forum:
- Hand-held 2,000 ft (600 m) altitude, about 2 km range
- Close 5,000 ft (1,500 m) altitude, up to 10 km range
- NATO type 10,000 ft (3,000 m) altitude, up to 50 km range
- Tactical 18,000 ft (5,500 m) altitude, about 160 km range
- MALE (medium altitude, long endurance) up to 30,000 ft (9,000 m) and range over 200 km
- HALE (high altitude, long endurance) over 30,000 ft (9,100 m) and indefinite range
- Hypersonic high-speed, supersonic (Mach 1–5) or hypersonic (Mach 5+) 50,000 ft (15,200 m) or suborbital altitude, range over 200 km
- Orbital low earth orbit (Mach 25+)
U.S. UAV demonstrators in 2005
Other categories include:
Hobbyist UAVs – which can be further divided into
- Ready-to-fly (RTF)/Commercial-off-the-shelf (COTS)
- Bind-and-fly (BNF) – require minimum knowledge to fly the platform
- Almost-ready-to-fly (ARF)/Do-it-yourself (DIY) – require significant knowledge to get in the air
- Bare frame – requires significant knowledge and your own parts to get it in the air
Classifications according to aircraft weight are quite simpler:
- Micro air vehicle (MAV) – the smallest UAVs that can weigh less than 1g
- Miniature UAV (also called SUAS) – approximately less than 25 kg
- Heavier UAVs
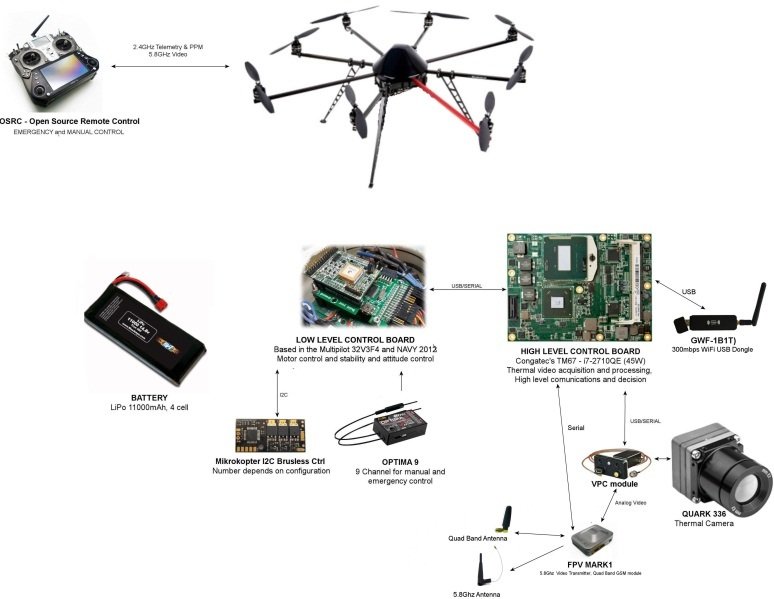
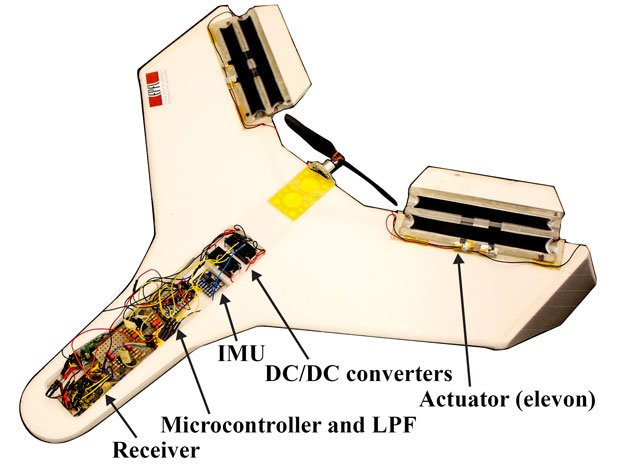
UAV components
- Crewed and uncrewed aircraft of the same type generally have recognizably similar physical components. The main exceptions are the cockpit and environmental control system or life support systems. Some UAVs carry payloads (such as a camera) that weigh considerably less than an adult human, and as a result can be considerably smaller. Though they carry heavy payloads, weaponized military UAVs are lighter than their crewed counterparts with comparable armaments.
- Small civilian UAVs have no life-critical systems, and can thus be built out of lighter but less sturdy materials and shapes, and can use less robustly tested electronic control systems. For small UAVs, the quadcopter design has become popular, though this layout is rarely used for crewed aircraft. Miniaturization means that less-powerful propulsion technologies can be used that are not feasible for crewed aircraft, such as small electric motors and batteries.
- Control systems for UAVs are often different from crewed craft. For remote human control, a camera and video link almost always replace the cockpit windows; radio-transmitted digital commands replace physical cockpit controls. Autopilot software is used on both crewed and uncrewed aircraft, with varying feature sets.
Body:The primary difference for planes is the absence of the cockpit area and its windows. Tailless quadcopters are a common form factor for rotary wing UAVs while tailed mono- and bi-copters are common for crewed platforms.
Power supply and platform:
Small UAVs mostly use lithium-polymer batteries (Li-Po), while larger vehicles rely on conventional airplane engines. Scale or size of aircraft is not the defining or limiting characteristic of energy supply for a UAV. At present, the energy density of Li-Po is far less than gasoline. The record of travel for a UAV (built from balsa wood and mylar skin) across the North Atlantic Ocean is held by a gasoline model airplane or UAV. Maynard Hill in “in 2003 when one of his creations flew 1,882 miles across the Atlantic Ocean on less than a gallon of fuel” holds this record. See: Electric power is used as less work is required for a flight and electric motors are quieter. Also, properly designed, the thrust to weight ratio for an electric or gasoline motor driving a propeller can hover or climb vertically. Bat Mite airplane is an example of an electric UAV which can climb vertically.
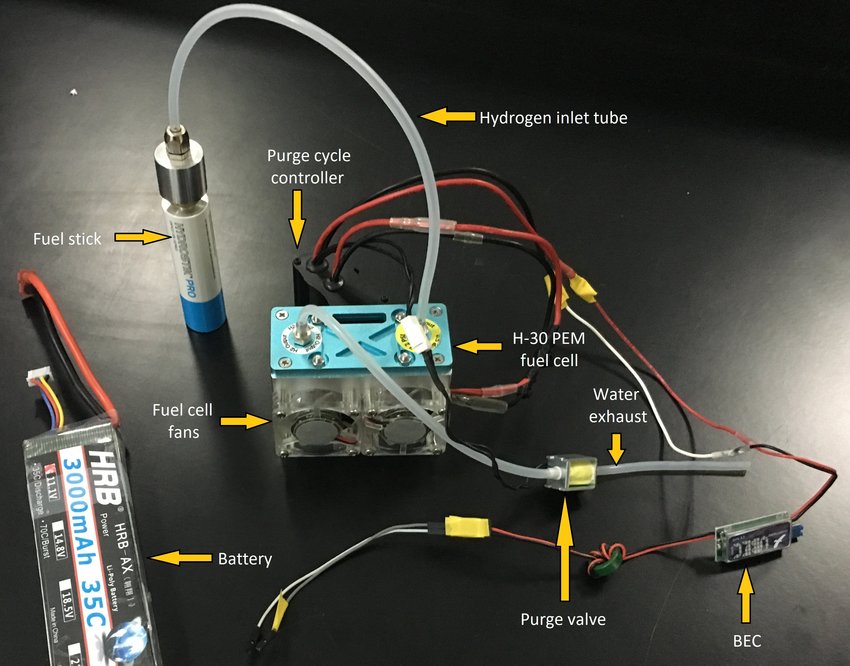
Battery elimination circuit (BEC) is used to centralize power distribution and often harbors a microcontroller unit (MCU). Costlier switching BECs diminish heating on the platform.
Computing
UAV computing capability followed the advances of computing technology, beginning with analog controls and evolving into microcontrollers, then system-on-a-chip (SOC) and single-board computers (SBC).
System hardware for small UAVs is often called the flight controller (FC), flight controller board (FCB) or autopilot.
Sensors
Position and movement sensors give information about the aircraft state. Exteroceptive sensors deal with external information like distance measurements, while proprioceptive ones correlate internal and external states.Non-cooperative sensors are able to detect targets autonomously so they are used for separation assurance and collision avoidance.

- Degrees of freedom (DOF) refers to both the amount and quality of sensors on board: 6 DOF implies 3-axis gyroscopes and accelerometers (a typical inertial measurement unit – IMU), 9 DOF refers to an IMU plus a compass, 10 DOF adds a barometer and 11 DOF usually adds a GPS receiver.
- Actuators:UAV actuators include digital electronic speed controllers (which control the RPM of the motors) linked to motors/engines and propellers, servo motors (for planes and helicopters mostly), weapons, payload actuators, LEDs and speakers.
Software
UAV software called the flight stack or autopilot. UAVs are real-time systems that require rapid response to changing sensor data. Examples include Raspberry Pis, Beagleboards, etc. shielded with NavIO, PXFMini, etc. or designed from scratch such as Nuttx, preemptive-RT Linux, Xenomai, Orocos-Robot Operating System or DDS-ROS 2.0.

Loop principles
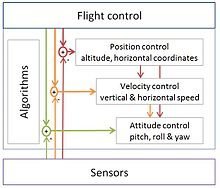
Typical flight-control loops for a multirotor
UAVs employ open-loop, closed-loop or hybrid control architectures.
- Open loop – This type provides a positive control signal (faster, slower, left, right, up, down) without incorporating feedback from sensor data.
- Closed loop – This type incorporates sensor feedback to adjust behavior (reduce speed to reflect tailwind, move to altitude 300 feet). The PID controller is common. Sometimes, feedforward is employed, transferring the need to close the loop further.
Flight controls
- UAVs can be programmed to perform aggressive maneuvers or landing/perching on inclined surfaces,and then to climb toward better communication spots. Some UAVs can control flight with varying flight modelisation,such as VTOL designs.
- UAVs can also implement perching on a flat vertical surface.
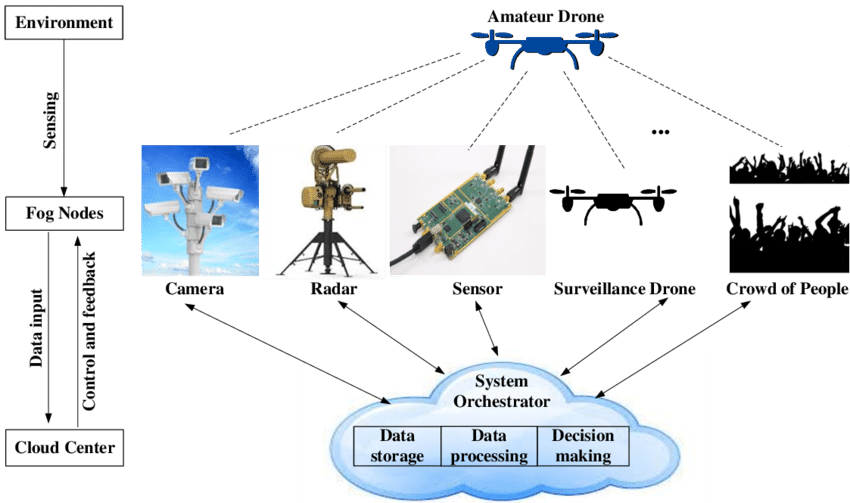
Communications
- Most UAVs use a radio for remote control and exchange of video and other data. Early UAVs had only narrowband uplink. Downlinks came later. These bi-directional narrowband radio links carried command and control (C&C) and telemetry data about the status of aircraft systems to the remote operator. For very long range flights, military UAVs also use satellite receivers as part of satellite navigation systems. In cases when video transmission was required, the UAVs will implement a separate analog video radio link.
- In the most modern UAV applications, video transmission is required. So instead of having 2 separate links for C&C, telemetry and video traffic, a broadband link is used to carry all types of data on a single radio link. These broadband links can leverage quality of service techniques to optimize the C&C traffic for low latency. Usually these broadband links carry TCP/IP traffic that can be routed over the Internet.
Conclusion:
It is obvious that drone technology is an important part of the future of warfare and is set to become a big commercial industry.The fact that drones capabilities pose a threat to the liberties of people around the globe is also apparent. This will be difficult due to the novelty of drone technology.Hope you have found all the details that you were looking for, in this article.